东莞市臻上机电设备有限公司
设为首页
加入收藏
English
手机版
搜 索
Toggle navigation
导航菜单
网站首页
公司介绍
供应信息
产品展示
资讯中心
公司动态
资质荣誉
在线留言
联系我们
公司动态
真空步进电机的基本结构和应用原理解析
真空步进电机的基本结构和工作原理
真空用步进电机
●无需真空导入装置,可直接放入真空环境中使用的步进的电机
●可轻松实现在真空环境下开环系统中的高精度控制
●提供能在低真空到超高真空的各种压力环境中使用的客制品
●能适应 200℃的高温环境
●与常用的步进电机尺寸大体相同大致相同
●适用于半导体制造设备、人造卫星用机器人
●适用于电子显微镜、加速器、光辐射分析仪等实验室设备
基本结构和工作原理
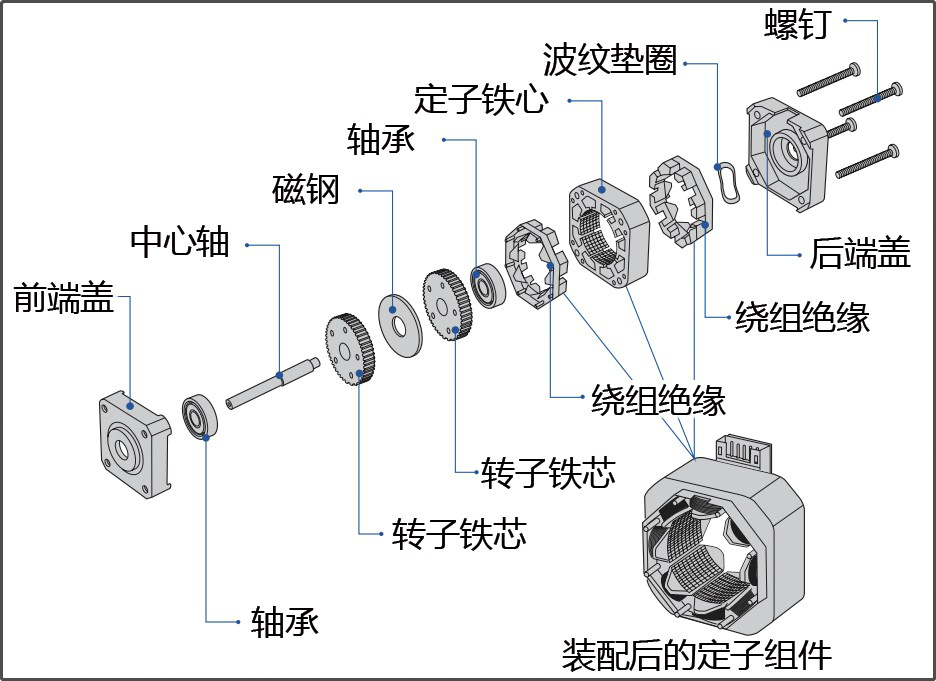
1.步进电机基本结构(如图1所示)
图 1 步进电机基本结构图
2.工作原理
步进电机驱动器根据外来的控制脉冲和方向信号, 通过其内部的逻辑电路,控制步进电机的绕组以一定的时序正向或反向通电,使得电机正向/反向旋转,或者锁定。
以1.8度两相步进电机为例:当两相绕组都通电励磁时,电机输出轴将静止并锁定位置。在额定电流下使电机保持锁定的zd力矩为保持力矩。如果其中一相绕组的电流发生了变向,则电机将顺着一个既定方向旋转一步( 1.8度)。
同理,如果是另外一项绕组的电流发生了变向,则电机将顺着与前者相反的方向旋转一步( 1.8 度)。当通过线圈绕组的电流按顺序依次变向励磁时,则电机会顺着既定的方向实现连续旋转步进,运行精度非常高。对于1.8度两相步进电机旋转一周需200步。
两相步进电机有两种绕组形式:双极性和单极性。
双极性电机每相上只有一个绕组线圈,电机连续旋转时电流要在同一线圈内依次变向励磁,驱动电路设计上需要八个电子开关进行顺序切换。单极性电机每相上有两个极性相反的绕组线圈,电机连续旋转时只要交替对同一相上的两个绕组线圈进行通电励磁。
驱动电路设计上只需要四个电子开关。在双极性驱动模式下,因为每相的绕组线圈为100%励磁,所以双极性驱动模式下电机的输出力矩比单极性驱动模式下提高了约40%。
真空步进电机的特性
1、 精准的位置控制
依照输入脉冲的数量,确定轴转动的角度。位置误差非常小(小于1/10度),且不累积。
2、精确的转速
步进电机的转速取决于输入电脉冲的频率,可以实现精确控制和方便调节。因此被广泛地应用于各种运动控制领域。
3、 正向/反向转动,急停及锁定功能
在整个速度范围内都可以实现对电机力矩和位置的有效控制,包括静力矩。在电机锁定状态下(电机绕组中存在电流,而外部没有旋转的脉冲指令输入),仍然保持一定的力矩输出。
4、 低转速条件下的精准位置控制
步进电机不需要借助齿轮箱的调节,就可以在非常低的转速下平稳运行,同时输出较大的力矩,避免了功率的损耗和角度位置偏差,同时降低了成本,节省了空间。
5、 更长的使用寿命
步进电机的无电刷设计保证了电机的使用寿命很长。步进电机的寿命通常取决于轴承。
振动与噪音
一般来讲,步进电机在空载运行情况下,当电机的运行频率接近或等于电机转子的固有频率时会发生共振, 严重的会发生失步现象。
针对共振的问题,有以下几种解决方案:
A. 避开振动区
使电机的工作频率不落在振动范围内。
B. 采用细分的驱动模式
使用微步驱动模式,将原来的一步细分为多步运行,提高电机的每步分辨率,从而降低振动。这可以通过调整电机的相电流比来实现的。微步并不会增加步距角精确度,却能使电机运行更加平稳,噪音更小。一般电机在半步运行时,力矩会比整步时小15%,而采用正弦波电流控制时,力矩将减小30%。
小结
在机械设计中,我们经常用到步进电机,比如,用步进电机驱动同步带轴,实现直线运动;再比如,用步进电机驱动滚珠丝杠轴,也可以把旋转运动转换为直线运动。因为不需要反馈系统,所以步进电机的zd优点是经济实用并且可以获得不错的精度。其实,除了机器中的运动平台,生活中也可以发现步进电机的存在,比如打印机,扫描仪,相机,ATM机,3D打印机等等。
免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!
上一篇:
真空伺服电机厂家给大家整理的伺服电机知识大汇总
下一篇:
不锈钢电机 高低温步进电机 低温电机-40度测试应用 厂家直销可定制
栏目导航
公司动态
技术文章
行业动态
成功案例
解决方案
联系我们
CONTACT US
电话:0769-23036566
传 真:0769-89026342
手 机:18922989930
邮 箱:936815907@qq.com
地 址:东莞市万江街道水凹路6号厚德福大厦611室